Координаты точки в трехмерном пространстве. Трехмерная и n-мерная система координат
Рассмотрим трехмерное пространство.
Определение 8.1. Подаффинной системой координат в трехмерном пространстве будем понимать геометрический образ, состоящий из фиксированной точки О и аффинного базиса .
Аффинную систему координат будем обозначать . Точка О называется началом координат , а векторы - координатными векторами .
Аналогично под прямоугольной декартовой системой координат будем понимать геометрический образ, состоящий из фиксированной точки О - начала координат и прямоугольного декартового базиса .
Направленные прямые, проходящие через начало координат и параллельные координатным векторам, называются координатными осями . Оси, параллельные векторам (или векторам ), называются соответственно осями абсцисс , ординат и аппликат и обозначаются Ox , Oy , Oz . Плоскости, определяемые осями Ох и Оy , Ox и Oz , Oy и Oz , называются координатными плоскостями и обозначаются соответственно через Oxy , Oxz , Oyz . Систему кординат (или ) обозначают также Oxyz .
В дальнейшем все рассуждения будем вести в прямоугольной декартовой системе координат.
Пусть - прямоугольная декартова система координат. Рассмотрим произвольную точку А трехмерного пространства.
Определение 8.2. Направленный отрезок называется радиус-вектором точки А .
Заметим, что между точками пространства и их радиус-векторами существует взаимно однозначное соответствие.
Определение 8.3. Координатами (прямоугольными декартовыми координатами) точки А трехмерного пространства называется тройка чисел (x , y , z ), где x , y , z - координаты радиус-вектора в ортонормированном базисе , т.е.
Аналогично названию координатных осей первую координату называют абсциссой , вторую - ординатой и третью - аппликатой точки .
Для построения точки А
в прямоугольной декартовой системе координат воспользуемся формулой (8.1). Отложим от точки O
векторы , , . Построим прямоугольный параллелепипед так, что его три измерения равны ![]() , тогда вектор совпадает с диагональю параллелепипеда. В справедливости вышесказанного несложно убедиться, поочередно складывая векторы , а затем векторы
, тогда вектор совпадает с диагональю параллелепипеда. В справедливости вышесказанного несложно убедиться, поочередно складывая векторы , а затем векторы ![]() по правилу параллелограмма. Конец вектора и есть искомая точка (см. рис. 9).
по правилу параллелограмма. Конец вектора и есть искомая точка (см. рис. 9).
Решение
. Из рисунка 10 видно, что ![]() . С учетом (8.1), имеем:
. С учетом (8.1), имеем: ![]() ,
, ![]() . Используя следствие 7.1, получим:
. Используя следствие 7.1, получим:
Таким образом, для того чтобы найти координаты вектора с известными координатами его начала и конца, нужно от координат конца вычесть координаты начала .
Задача 2 (о делении отрезка в данном соотношении
)
. Рассмотрим отрезок , причем и ![]() . Пусть данный отрезок точкой M
делится в соотношении . Найдем координаты точки М
.
. Пусть данный отрезок точкой M
делится в соотношении . Найдем координаты точки М
.
Решение . Из рисунка 11 видно, что справедливо векторное равенство
![]() .
.
Предположим, что точка M
имеет координаты . Находя по формуле (8.2) координаты векторов ![]() и учитывая теорему 7.1, получим равенства:
и учитывая теорему 7.1, получим равенства:

Выражая из первого равенства x , из второго - y , а из третьего - z , находим координаты точки М :
В случае, если , т. е. ![]() , получаем формулу координат середины отрезка
, получаем формулу координат середины отрезка
Замечание. На плоскости (в двумерном пространстве) можно так же задать прямоугольную систему координат Oxy . С помощью введенной системы координат любую точку или ее радиус-вектор можно представить парой чисел (x , y ). Все соотношения, полученные нами ранее для координат векторов и точек трехмерного пространства, будут справедливы и на плоскости с той лишь разницей, что из них нужно всюду убрать третью координату z . Аналогичные рассуждения можно повторить и для произвольной прямой (одномерного пространства).
Проекция вектора на ось
Определение 9.1. Осью называется прямая с лежащим на ней единичным вектором (ортом), задающим положительное направление на прямой.
На рисунке ось будем изображать в виде направленной прямой.
Пусть в пространстве задана ось l и точка А , не принадлежащая оси.
Определение 9.2. Основание перпендикуляра, опущенного из точки А на прямую l , точка , называется проекцией (ортогональной проекцией) точки на ось.
В случае, если точка А принадлежит оси l , то проекция точки на ось совпадает с самой точкой А .
Пусть задан некоторый вектор . Находя проекции начала и конца вектора на ось l , получимвектор , где - соответственно проекции точек А , В на ось l .
Определение 9.3. Проекцией вектора на ось l будем называть положительное число, равное , если вектор и ось l направлены одинаково (см. рис. 12) и отрицательное число , если вектор и ось l направлены противоположно (см. рис. 13).

Следствие 9.2. Проекции равных векторов на одну и ту же ось равны между собой.
| M |
| Q |
| R |
| O |
| Рис.15 |
| z |
| O |
| y |
| x |
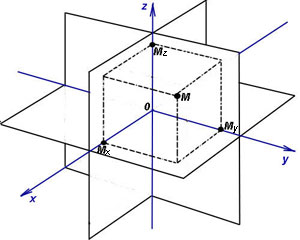
Точка О называется началом координат. Первая ось называется осью Ох , или осью абсцисс, вторая – осью Оу , или осью ординат, третья – осью Оz , или осью аппликат. Плоскость, проходящая через две оси из трех Ох , Оу , Оz , называется координатой плоскостью; координатных плоскостей 3. Они обозначаются так: yOz , zOx и xOy .
Пусть М – произвольная точка пространства. Обозначим через Р проекцию точки М на ось Ох параллельно плоскости yOz , а через х – координату точки Р на оси Ох . Через Q обозначим проекцию точки М на ось Оу параллельно плоскости zOx , а через у – координату точки Q на оси Оу . Через R обозначим проекцию точки М на ось Оz параллельно плоскости xOy , а через z – координату точки R на оси Оz (См. рис. 15).
Три числа x , y , z взятые в этом порядке, называются общими декартовыми (или аффинными) координатами точки М . Первая координата называется абсциссой точки М , вторая у – ординатой точки М , и третья z – аппликатой точки М . Точка М с координатами x , y , z обозначается М (x , y , z ).
Абсцисса точки М равна нулю тогда и только тогда, когда точка М лежит на плоскости yOz . Аналогично про ординату и аппликату.
Отсюда следуют, что точка М (x , y , z ) лежит на оси Ох тогда и только тогда, когда у =z =0, аналогично про оси Оу , Оz . Для начала координат х =у =z =0.
Точки , называются единичными точками осей координат. Точка называется единичной точкой системы координат .
Параллелепипед с вершиной в начале координат О и с ребрами, называется масштабным параллелепипедом. Отрезки, являются масштабными отрезками соответственно осей Ох, Оу, Оz. Векторы
называется масштабными векторами сответственно осей Ох , Оу , Оz .
При помощи общей декартовой системы координат устанавливается взаимно однозначное соответствие между множеством всех точек пространства и множеством всех упорядоченных троек действительных чисел. Здесь для построения точки М , имеющей координатами заданные числа х , у , z , поступают так: если то строят на осях Ох , Оу , Оz точки P , Q , R , имеющие на этих осях координаты, соответственно равные х , у , z и проводят через точки P , Q , R плоскости, соответственно параллельные координатным плоскостям уОz , zOx , xOy ; точка М – есть точка пересечения этих плоскостей.
Декартовой прямоугольной системой координат в пространстве называется упорядоченная тройка попарно перпендикулярных осей координат с общим началом координат О на каждой из них и с одним и тем же масштабным отрезком для каждой оси (см.рис.).
Декартовы прямоугольные координаты точки М определяются аналогично. Это ортогональные проекции точки М на оси Ох , Оу , Оz .
Отметим, что часто масштабные векторы осей Ох , Оу , Оz в декартовой прямоугольной системе координат обозначаются.
Упорядоченная система двух или трёх пересекающихся перпендикулярных друг другу осей с общим началом отсчёта (началом координат) и общей единицей длины называется прямоугольной декартовой системой координат .
Общая декартова система координат (аффинная система координат ) может включать и не обязательно перпендикулярные оси. В честь французского математика Рене Декарта (1596-1662) названа именно такая система координат, в которой на всех осях отсчитывается общая единица длины и оси являются прямыми.
Прямоугольная декартова система координат на плоскости имеет две оси, а прямоугольная декартова система координат в пространстве - три оси. Каждая точка на плоскости или в пространстве определяется упорядоченным набором координат - чисел в соответствии единице длины системы координат.
Заметим, что, как следует из определения, существует декартова система координат и на прямой, то есть в одном измерении. Введение декартовых координат на прямой представляет собой один из способов, с помощью которого любой точке прямой ставится в соответствие вполне определённое вещественное число, то есть координата.
Метод координат, возникший в работах Рене Декарта, ознаменовал собой революционную перестройку всей математики. Появилась возможность истолковывать алгебраические уравнения (или неравенства) в виде геометрических образов (графиков) и, наоборот, искать решение геометрических задач с помощью аналитических формул, систем уравнений. Так, неравенство z < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOy и находящейся выше этой плоскости на 3 единицы.
С помощью декартовой системы координат принадлежность точки заданной кривой соответствует тому, что числа x и y удовлетворяют некоторому уравнению. Так, координаты точки окружности с центром в заданной точке (a ; b ) удовлетворяют уравнению (x - a )² + (y - b )² = R ² .
Прямоугольная декартова система координат на плоскости
Две перпендикулярные оси на плоскости с общим началом и одинаковой масштабной единицей образуют декартову прямоугольную систему координат на плоскости . Одна из этих осей называется осью Ox , или осью абсцисс , другую - осью Oy , или осью ординат . Эти оси называются также координатными осями. Обозначим через M x и M y соответственно проекции произвольной точки М на оси Ox и Oy . Как получить проекции? Проведём через точку М Ox . Эта прямая пересекает ось Ox в точке M x . Проведём через точку М прямую, перпендикулярную оси Oy . Эта прямая пересекает ось Oy в точке M y . Это показано на рисунке ниже.
x и y точки М будем называть соответственно величины направленных отрезков OM x и OM y . Величины этих направленных отрезков рассчитываются соответственно как x = x 0 - 0 и y = y 0 - 0 . Декартовы координаты x и y точки М абсциссой и ординатой . Тот факт, что точка М имеет координаты x и y , обозначается так: M (x , y ) .
Координатные оси разбивают плоскость на четыре квадранта , нумерация которых показана на рисунке ниже. На нём же указана расстановка знаков координат точек в зависимости от их расположения в том или ином квадранте.
Помимо декартовых прямоугольных координат на плоскости часто рассматривается также полярная система координат. О способе перехода от одной системы координат к другой - в уроке полярная система координат .

Прямоугольная декартова система координат в пространстве
Декартовы координаты в пространстве вводятся в полной аналогии с декартовыми координатами на плоскости.
Три взаимно перпендикулярные оси в пространстве (координатные оси) с общим началом O и одинаковой масштабной единицей образуют декартову прямоугольную систему координат в пространстве .
Одну из указанных осей называют осью Ox , или осью абсцисс , другую - осью Oy , или осью ординат , третью - осью Oz , или осью аппликат . Пусть M x , M y M z - проекции произвольной точки М пространства на оси Ox , Oy и Oz соответственно.
Проведём через точку М Ox Ox в точке M x . Проведём через точку М плоскость, перпендикулярную оси Oy . Эта плоскость пересекает ось Oy в точке M y . Проведём через точку М плоскость, перпендикулярную оси Oz . Эта плоскость пересекает ось Oz в точке M z .
Декартовыми прямоугольными координатами x , y и z точки М будем называть соответственно величины направленных отрезков OM x , OM y и OM z . Величины этих направленных отрезков рассчитываются соответственно как x = x 0 - 0 , y = y 0 - 0 и z = z 0 - 0 .
Декартовы координаты x , y и z точки М называются соответственно её абсциссой , ординатой и аппликатой .
Попарно взятые координатные оси располагаются в координатных плоскостях xOy , yOz и zOx .
Задачи о точках в декартовой системе координат
Пример 1.
A (2; -3) ;
B (3; -1) ;
C (-5; 1) .
Найти координаты проекций этих точек на ось абсцисс.
Решение. Как следует из теоретической части этого урока, проекция точки на ось абсцисс расположена на самой оси абсцисс, то есть оси Ox , а следовательно имеет абсциссу, равную абсциссе самой точки, и ординату (координату на оси Oy , которую ось абсцисс пересекает в точке 0), равную нулю. Итак получаем следующие координаты данных точек на ось абсцисс:
A x (2; 0) ;
B x (3; 0) ;
C x (-5; 0) .
Пример 2. В декартовой системе координат на плоскости даны точки
A (-3; 2) ;
B (-5; 1) ;
C (3; -2) .
Найти координаты проекций этих точек на ось ординат.
Решение. Как следует из теоретической части этого урока, проекция точки на ось ординат расположена на самой оси ординат, то есть оси Oy , а следовательно имеет ординату, равную ординате самой точки, и абсциссу (координату на оси Ox , которую ось ординат пересекает в точке 0), равную нулю. Итак получаем следующие координаты данных точек на ось ординат:
A y (0; 2) ;
B y (0; 1) ;
C y (0; -2) .
Пример 3. В декартовой системе координат на плоскости даны точки
A (2; 3) ;
B (-3; 2) ;
C (-1; -1) .
Ox .
Ox Ox Ox , будет иметь такую же абсциссу, что и данная точка, и ординату, равную по абсолютной величине ординате данной точки, и противоположную ей по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно оси Ox :
A" (2; -3) ;
B" (-3; -2) ;
C" (-1; 1) .
Решить задачи на декартову систему координат самостоятельно, а затем посмотреть решения
Пример 4. Определить, в каких квадрантах (четвертях, рисунок с квадрантами - в конце параграфа "Прямоугольная декартова система координат на плоскости") может быть расположена точка M (x ; y ) , если
1) xy > 0 ;
2) xy < 0 ;
3) x − y = 0 ;
4) x + y = 0 ;
5) x + y > 0 ;
6) x + y < 0 ;
7) x − y > 0 ;
8) x − y < 0 .
Пример 5. В декартовой системе координат на плоскости даны точки
A (-2; 5) ;
B (3; -5) ;
C (a ; b ) .
Найти координаты точек, симметричных этим точкам относительно оси Oy .
Продолжаем решать задачи вместе
Пример 6. В декартовой системе координат на плоскости даны точки
A (-1; 2) ;
B (3; -1) ;
C (-2; -2) .
Найти координаты точек, симметричных этим точкам относительно оси Oy .
Решение. Поворачиваем на 180 градусов вокруг оси Oy направленный отрезок, идущий от оси Oy до данной точки. На рисунке, где обозначены квадранты плоскости, видим, что точка, симметричная данной относительно оси Oy , будет иметь такую же ординату, что и данная точка, и абсциссу, равную по абсолютной величине абсциссе данной точки, и противоположную ей по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно оси Oy :
A" (1; 2) ;
B" (-3; -1) ;
C" (2; -2) .
Пример 7. В декартовой системе координат на плоскости даны точки
A (3; 3) ;
B (2; -4) ;
C (-2; 1) .
Найти координаты точек, симметричных этим точкам относительно начала координат.
Решение. Поворачиваем на 180 градусов вокруг начала координат направленный отрезок, идущий от начала координат к данной точке. На рисунке, где обозначены квадранты плоскости, видим, что точка, симметричная данной относительно начала координат, будет иметь абсциссу и ординату, равные по абсолютной величине абсциссе и ординате данной точки, но противоположные им по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно начала координат:
A" (-3; -3) ;
B" (-2; 4) ;
C (2; -1) .
Пример 8.
A (4; 3; 5) ;
B (-3; 2; 1) ;
C (2; -3; 0) .
Найти координаты проекций этих точек:
1) на плоскость Oxy ;
2) на плоскость Oxz ;
3) на плоскость Oyz ;
4) на ось абсцисс;
5) на ось ординат;
6) на ось апликат.
1) Проекция точки на плоскость Oxy расположена на самой этой плоскости, а следовательно имеет абсциссу и ординату, равные абсциссе и ординате данной точки, и апликату, равную нулю. Итак получаем следующие координаты проекций данных точек на Oxy :
A xy (4; 3; 0) ;
B xy (-3; 2; 0) ;
C xy (2; -3; 0) .
2) Проекция точки на плоскость Oxz расположена на самой этой плоскости, а следовательно имеет абсциссу и апликату, равные абсциссе и апликате данной точки, и ординату, равную нулю. Итак получаем следующие координаты проекций данных точек на Oxz :
A xz (4; 0; 5) ;
B xz (-3; 0; 1) ;
C xz (2; 0; 0) .
3) Проекция точки на плоскость Oyz расположена на самой этой плоскости, а следовательно имеет ординату и апликату, равные ординате и апликате данной точки, и абсциссу, равную нулю. Итак получаем следующие координаты проекций данных точек на Oyz :
A yz (0; 3; 5) ;
B yz (0; 2; 1) ;
C yz (0; -3; 0) .
4) Как следует из теоретической части этого урока, проекция точки на ось абсцисс расположена на самой оси абсцисс, то есть оси Ox , а следовательно имеет абсциссу, равную абсциссе самой точки, а ордината и апликата проекции равны нулю (поскольку оси ординат и апликат пересекают ось абсцисс в точке 0). Получаем следующие координаты проекций данных точек на ось абсцисс:
A x (4; 0; 0) ;
B x (-3; 0; 0) ;
C x (2; 0; 0) .
5) Проекция точки на ось ординат расположена на самой оси ординат, то есть оси Oy , а следовательно имеет ординату, равную ординате самой точки, а абсцисса и апликата проекции равны нулю (поскольку оси абсцисс и апликат пересекают ось ординат в точке 0). Получаем следующие координаты проекций данных точек на ось ординат:
A y (0; 3; 0) ;
B y (0; 2; 0) ;
C y (0; -3; 0) .
6) Проекция точки на ось апликат расположена на самой оси апликат, то есть оси Oz , а следовательно имеет апликату, равную апликате самой точки, а абсцисса и ордината проекции равны нулю (поскольку оси абсцисс и ординат пересекают ось апликат в точке 0). Получаем следующие координаты проекций данных точек на ось апликат:
A z (0; 0; 5) ;
B z (0; 0; 1) ;
C z (0; 0; 0) .
Пример 9. В декартовой системе координат в пространстве даны точки
A (2; 3; 1) ;
B (5; -3; 2) ;
C (-3; 2; -1) .
Найти координаты точек, симметричных этим точкам относительно:
1) плоскости Oxy ;
2) плоскости Oxz ;
3) плоскости Oyz ;
4) оси абсцисс;
5) оси ординат;
6) оси апликат;
7) начала координат.
1) "Продвигаем" точку по другую сторону оси Oxy Oxy , будет иметь абсциссу и ординату, равные абсциссе и ординате данной точки, и апликату, равную по величине апликате данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oxy :
A" (2; 3; -1) ;
B" (5; -3; -2) ;
C" (-3; 2; 1) .
2) "Продвигаем" точку по другую сторону оси Oxz на то же расстояние. По рисунку, отображающему координатное пространство, видим, что точка, симметричная данной относительно оси Oxz , будет иметь абсциссу и апликату, равные абсциссе и апликате данной точки, и ординату, равную по величине ординате данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oxz :
A" (2; -3; 1) ;
B" (5; 3; 2) ;
C" (-3; -2; -1) .
3) "Продвигаем" точку по другую сторону оси Oyz на то же расстояние. По рисунку, отображающему координатное пространство, видим, что точка, симметричная данной относительно оси Oyz , будет иметь ординату и апликату, равные ординате и апликате данной точки, и абсциссу, равную по величине абсциссе данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oyz :
A" (-2; 3; 1) ;
B" (-5; -3; 2) ;
C" (3; 2; -1) .
По аналогии с симметричными точками на плоскости и точками пространства, симметричными данным относительно плоскостей, замечаем, что в случае симметрии относительно некоторой оси декартовой системы координат в пространстве, координата на оси, относительно которой задана симметрия, сохранит свой знак, а координаты на двух других осях будут теми же по абсолютной величине, что и координаты данной точки, но противоположными по знаку.
4) Свой знак сохранит абсцисса, а ордината и апликата поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси абсцисс:
A" (2; -3; -1) ;
B" (5; 3; -2) ;
C" (-3; -2; 1) .
5) Свой знак сохранит ордината, а абсцисса и апликата поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси ординат:
A" (-2; 3; -1) ;
B" (-5; -3; -2) ;
C" (3; 2; 1) .
6) Свой знак сохранит апликата, а абсцисса и ордината поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси апликат:
A" (-2; -3; 1) ;
B" (-5; 3; 2) ;
C" (3; -2; -1) .
7) По аналогии с симметрии в случае с точками на плоскости, в случае симметрии относительно начала координат все координаты точки, симметричной данной, будут равными по абсолютной величине координатам данной точки, но противоположными им по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно начала координат.
), с помощью которых определяют положение светил и вспомогательных точек на небесной сфере. В астрономии употребляют различные системы небесных координат. Каждая из них по существу представляет собой сферическую систему координат (без радиальной координаты) с соответствующим образом выбранной фундаментальной плоскостью и началом отсчёта. В зависимости от выбора фундаментальной плоскости система небесных координат называется горизонтальной (плоскость горизонта), экваториальной (плоскость экватора), эклиптической (плоскость эклиптики) или галактической (галактическая плоскость).
Координаты на плоскости и в пространстве можно вводить бесконечным числом разных способов. Решая ту или иную математическую или физическую задачу методом координат, можно использовать различные координатные системы, выбирая ту из них, в которой задача решается проще или удобнее в данном конкретном случае. Известным обобщением системы координат являются системы отсчёта и системы референции .
Энциклопедичный YouTube
1 / 5
Модель декартовой системы координат.
Геометрия 11 класс - Прямоугольная система координат в пространстве
Координатная плоскость ➽ Алгебра 7 класс ➽ Видеоурок
Видеоурок "Полярная система координат"
Прямоугольная система координат в пространстве. Координаты вектора. Видеоурок по геометрии 11 класс
Субтитры
Основные системы
В этом разделе даются разъяснения к наиболее употребляемым системам координат в элементарной математике.
Декартовы координаты
Расположение точки P на плоскости определяется декартовыми координатами с помощью пары чисел (x , y) : {\displaystyle (x,y):}
В пространстве необходимо уже 3 координаты (x , y , z) : {\displaystyle (x,y,z):}
Полярные координаты
В полярной системе координат , применяемой на плоскости, положение точки P определяется её расстоянием до начала координат r = |OP| и углом φ её радиус-вектора к оси Ox .
В пространстве применяются обобщения полярных координат - цилиндрические и сферические системы координат.
Цилиндрические координаты
Цилиндрические координаты - трёхмерный аналог полярных, в котором точка P представляется упорядоченной тройкой (r , φ , z) . {\displaystyle (r,\varphi ,z).}
Примечание: в литературе для первой (радиальной) координаты иногда используется обозначение ρ , для второй (угловой, или азимутальной) - обозначение θ , для третьей координаты - обозначение h .Полярные координаты имеют один недостаток: значение φ не определено при r = 0 .
Цилиндрические координаты полезны для изучения систем, симметричных относительно некоторой оси. Например, длинный цилиндр с радиусом R в декартовых координатах (с осью z , совпадающей с осью цилиндра) имеет уравнение x 2 + y 2 = R 2 , {\displaystyle x^{2}+y^{2}=R^{2},} тогда как в цилиндрических координатах оно выглядит гораздо проще, как r = R .
Сферические координаты
Сферические координаты - трёхмерный аналог полярных.
В сферической системе координат расположение точки P определяется тремя компонентами: (ρ , φ , θ) . {\displaystyle (\rho ,\varphi ,\theta).} В терминах декартовой системы координат,
Примечание: в литературе иногда азимут обозначается θ , а полярный угол - φ . Иногда для радиальной координаты используется r вместо ρ . Кроме того, диапазон углов для азимута может выбираться как (−180°, +180°] вместо диапазона , а не в диапазоне . Иногда порядок координат в тройке выбирается отличным от описанного; например, полярный и азимутальный углы могут быть переставлены.Сферическая система координат также имеет недостаток: φ и θ не определены, если ρ = 0; угол φ не определён также и для граничных значений θ = 0 и θ = 180° (или для θ = ±90°, в случае принятия соответствующего диапазона для этого угла).
Для построения точки P по её сферическим координатам нужно от полюса вдоль положительной полуоси z отложить отрезок, равный ρ , повернуть его на угол θ вокруг оси y x , и затем повернуть на угол θ вокруг оси z в направлении положительной полуоси y .
Сферические координаты полезны при изучении систем, симметричных относительно точки. Так, уравнение сферы с радиусом R в декартовых координатах с началом отсчёта в центре сферы выглядит как x 2 + y 2 + z 2 = R 2 , {\displaystyle x^{2}+y^{2}+z^{2}=R^{2},} тогда как в сферических координатах оно становится намного проще: ρ = R . {\displaystyle \rho =R.}
Другие распространённые системы координат
- Аффинная (косоугольная) система координат - прямолинейная система координат в аффинном пространстве . На плоскости задается точкой начала координат О и двумя упорядоченными неколлинеарными векторами , которые представляют собой аффинный базис. Осями координат в данном случае называются прямые , проходящие через точку начала координат параллельно векторам базиса, которые, в свою очередь, задают положительное направление осей. В трехмерном пространстве , соответственно, аффинная система координат задается тройкой линейно независимых векторов и точкой начала координат. Для определения координат некоторой точки М вычисляются коэффициенты разложения вектора ОМ по векторам базиса .
- Барицентрические координаты были впервые введены в 1827 году А. Мебиусом , решавшим вопрос о центре тяжести масс, расположенных на вершинах треугольника . Они аффинно инвариантны, представляют собой частный случай общих однородных координат . Точка с барицентрическими координатами расположена в n -мерном векторном пространстве E n , а собственно координаты при этом относятся к фиксированной системе точек, которые не лежат в (n −1)-мерном подпространстве. Барицентрические координаты используются также и в алгебраической топологии применительно к точкам симплекса .
- Биангулярные координаты - частный случай бицентрических координат, система координат на плоскости, задаваемая двумя фиксированными точками С 1 и С 2 , через которые проводится прямая, выступающая в качестве оси абсцисс. Позиция некоторой точки P , которая не лежит на этой прямой, определяется углами PC 1 C 2 и PC 2 C 1 .
- Биполярные координаты характеризуются тем, что в качестве координатных линий на плоскости в этом случае выступают два семейства окружностей с полюсами A и B , а также семейство окружностей, ортогональных к ним. Преобразование биполярных координат в декартовы прямоугольные осуществляется посредством специальных формул. Биполярные координаты в пространстве называются бисферическими; в этом случае координатными поверхностями являются сферы , поверхности, образуемые вращением дуг окружностей, а также полуплоскости , проходящие через ось O z .
- Бицентрические координаты - всякая система координат, которая основана на двух фиксированных точках и в рамках которой положение некоторой другой точки определяется, как правило, степенью её удаления или вообще позицией относительно этих двух основных точек. Системы подобного рода могут быть довольно полезны в определённых сферах научных исследований .
- Бицилиндрические координаты - система координат, которая образуется в том случае, если система биполярных координат на плоскости O xy параллельно переносится вдоль оси O z . В качестве координатных поверхностей в этом случае выступают семейство пар круговых цилиндров , оси которых параллельны, семейство ортогональных к ним круговых цилиндров, а также плоскость. Для перевода бицилиндрических координат в декартовы прямоугольные для трехмерного пространства также применяются специальные формулы .
- Конические координаты - трехмерная ортогональная система координат, состоящая из концентрических сфер, которые описываются посредством их радиуса , и двух семейств перпендикулярных конусов , расположенных вдоль осей x и z .
- Координаты Риндлера используются преимущественно в рамках теории относительности и описывают ту часть плоского пространства-времени , которая обыкновенно называется пространством Минковского . В специальной теории относительности равномерно ускоряющаяся частица находится в гиперболическом движении , и для каждой такой частицы в координатах Риндлера может быть выбрана такая точка отсчёта , относительно которой она покоится.
- Параболические координаты - это двумерная ортогональная система координат, в которой координатными линиями является совокупность конфокальных парабол . Трехмерная модификация параболических координат строится путём вращения двумерной системы вокруг оси симметрии этих парабол. У параболических координат также имеется определенный спектр потенциальных практических приложений: в частности, они могут использоваться применительно к эффекту Штарка . Параболические координаты связаны определенным отношением с прямоугольными декартовыми .
- Проективные координаты существуют, согласно наименованию, в проективном пространстве П n (К ) и представляют собой взаимно однозначное соответствие между его элементами и классами конечных подмножеств элементов тела К , характеризующихся свойствами эквивалентности и упорядоченности. Для определения проективных координат проективных подпространств достаточно определить соответствующие координаты точек проективного пространства. В общем случае относительно некоторого базиса проективные координаты вводятся чисто проективными средствами .
- Тороидальная система координат - трехмерная ортогональная система координат, получаемая в результате вращения двумерной биполярной системы координат вокруг оси, разделяющей два её фокуса. Фокусы биполярной системы, соответственно, превращаются в кольцо с радиусом а , лежащее на плоскости xy тороидальной системы координат, в то время как ось z становится осью вращения системы. Фокальное кольцо также называют иногда базовой окружностью .
- Трилинейные координаты являются одним из образцов однородных координат и имеют своей основой заданный треугольник, так что положение некоторой точки определяется относительно сторон этого треугольника - главным образом степенью удаленности от них, хотя возможны и другие вариации. Трилинейные координаты могут быть относительно просто преобразованы в барицентрические; кроме того, они также конвертируемы в двумерные прямоугольные координаты, для чего используются соответствующие формулы .
- Цилиндрические параболические координаты - трехмерная ортогональная система координат, получаемая в результате пространственного преобразования двумерной параболической системы координат. Координатными поверхностями, соответственно, служат конфокальные параболические цилиндры. Цилиндрические параболические координаты связаны определенным отношением с прямоугольными, могут быть применены в ряде сфер научных исследований .
- Эллипсоидальные координаты - эллиптические координаты в пространстве. Координатными поверхностями в данном случае являются эллипсоиды , однополостные гиперболоиды , а также двуполостные гиперболоиды, центры которых расположены в начале координат. Система ортогональна. Каждой тройке чисел, являющихся эллипсоидальными координатами, соответствуют восемь точек, которые относительно плоскостей системы O xyz симметричны друг другу .
Переход из одной системы координат в другую
Декартовы и полярные
где u 0 - функция Хевисайда с u 0 (0) = 0 , {\displaystyle u_{0}(0)=0,} а sgn - функция signum . Здесь функции u 0 и sgn используются как «логические» переключатели, аналогичные по значению операторам «если.. то» (if…else) в языках программирования. Некоторые языки программирования имеют специальную функцию atan2 (y , x ), которая возвращает правильный φ в необходимом квадранте , определённом координатами x и y .
Декартовы и цилиндрические
x = r cos φ , {\displaystyle x=r\,\cos \varphi ,} y = r sin φ , {\displaystyle y=r\,\sin \varphi ,} r = x 2 + y 2 , {\displaystyle r={\sqrt {x^{2}+y^{2}}},} φ = arctg y x + π u 0 (− x) sgn y , {\displaystyle \varphi =\operatorname {arctg} {\frac {y}{x}}+\pi u_{0}(-x)\,\operatorname {sgn} y,} z = z . {\displaystyle z=z.\quad } (d x d y d z) = (r cos θ − r sin φ 0 r sin θ r cos φ 0 0 0 1) ⋅ (d r d φ d z) , {\displaystyle {\begin{pmatrix}dx\\dy\\dz\end{pmatrix}}={\begin{pmatrix}r\cos \theta &-r\sin \varphi &0\\r\sin \theta &r\cos \varphi &0\\0&0&1\end{pmatrix}}\cdot {\begin{pmatrix}dr\\d\varphi \\dz\end{pmatrix}},} (d r d φ d z) = (x x 2 + y 2 y x 2 + y 2 0 − y x 2 + y 2 x x 2 + y 2 0 0 0 1) ⋅ (d x d y d z) . {\displaystyle {\begin{pmatrix}dr\\d\varphi \\dz\end{pmatrix}}={\begin{pmatrix}{\frac {x}{\sqrt {x^{2}+y^{2}}}}&{\frac {y}{\sqrt {x^{2}+y^{2}}}}&0\\{\frac {-y}{\sqrt {x^{2}+y^{2}}}}&{\frac {x}{\sqrt {x^{2}+y^{2}}}}&0\\0&0&1\end{pmatrix}}\cdot {\begin{pmatrix}dx\\dy\\dz\end{pmatrix}}.}Декартовы и сферические
x = ρ sin θ cos φ , {\displaystyle {x}=\rho \,\sin \theta \,\cos \varphi ,\quad } y = ρ sin θ sin φ , {\displaystyle {y}=\rho \,\sin \theta \,\sin \varphi ,\quad } z = ρ cos θ ; {\displaystyle {z}=\rho \,\cos \theta ;\quad } ρ = x 2 + y 2 + z 2 , {\displaystyle {\rho }={\sqrt {x^{2}+y^{2}+z^{2}}},} θ = arccos z ρ = arctg x 2 + y 2 z , {\displaystyle {\theta }=\arccos {\frac {z}{\rho }}=\operatorname {arctg} {\frac {\sqrt {x^{2}+y^{2}}}{z}},} φ = arctg y x + π u 0 (− x) sgn y . {\displaystyle {\varphi }=\operatorname {arctg} {\frac {y}{x}}+\pi \,u_{0}(-x)\,\operatorname {sgn} y.} (d x d y d z) = (sin θ cos φ ρ cos θ cos φ − ρ sin θ sin φ sin θ sin φ ρ cos θ sin φ ρ sin θ cos φ cos θ − ρ sin θ 0) ⋅ (d ρ d θ d φ) , {\displaystyle {\begin{pmatrix}dx\\dy\\dz\end{pmatrix}}={\begin{pmatrix}\sin \theta \cos \varphi &\rho \cos \theta \cos \varphi &-\rho \sin \theta \sin \varphi \\\sin \theta \sin \varphi &\rho \cos \theta \sin \varphi &\rho \sin \theta \cos \varphi \\\cos \theta &-\rho \sin \theta &0\end{pmatrix}}\cdot {\begin{pmatrix}d\rho \\d\theta \\d\varphi \end{pmatrix}},} (d ρ d θ d φ) = (x / ρ y / ρ z / ρ x z ρ 2 x 2 + y 2 y z ρ 2 x 2 + y 2 − (x 2 + y 2) ρ 2 x 2 + y 2 − y x 2 + y 2 x x 2 + y 2 0) ⋅ (d x d y d z) . {\displaystyle {\begin{pmatrix}d\rho \\d\theta \\d\varphi \end{pmatrix}}={\begin{pmatrix}x/\rho &y/\rho &z/\rho \\{\frac {xz}{\rho ^{2}{\sqrt {x^{2}+y^{2}}}}}&{\frac {yz}{\rho ^{2}{\sqrt {x^{2}+y^{2}}}}}&{\frac {-(x^{2}+y^{2})}{\rho ^{2}{\sqrt {x^{2}+y^{2}}}}}\\{\frac {-y}{x^{2}+y^{2}}}&{\frac {x}{x^{2}+y^{2}}}&0\end{pmatrix}}\cdot {\begin{pmatrix}dx\\dy\\dz\end{pmatrix}}.}Цилиндрические и сферические
r = ρ sin θ , {\displaystyle {r}=\rho \,\sin \theta ,} φ = φ , {\displaystyle {\varphi }=\varphi ,\quad } z = ρ cos θ ; {\displaystyle {z}=\rho \,\cos \theta ;} ρ = r 2 + z 2 , {\displaystyle {\rho }={\sqrt {r^{2}+z^{2}}},} θ = arctg z r + π u 0 (− r) sgn z , {\displaystyle {\theta }=\operatorname {arctg} {\frac {z}{r}}+\pi \,u_{0}(-r)\,\operatorname {sgn} z,} φ = φ . {\displaystyle {\varphi }=\varphi .\quad } (d r d φ d h) = (sin θ ρ cos θ 0 0 0 1 cos θ − ρ sin θ 0) ⋅ (d ρ d θ d φ) , {\displaystyle {\begin{pmatrix}dr\\d\varphi \\dh\end{pmatrix}}={\begin{pmatrix}\sin \theta &\rho \cos \theta &0\\0&0&1\\\cos \theta &-\rho \sin \theta &0\end{pmatrix}}\cdot {\begin{pmatrix}d\rho \\d\theta \\d\varphi \end{pmatrix}},} (d ρ d θ d φ) = (r r 2 + z 2 0 z r 2 + z 2 − z r 2 + z 2 0 r r 2 + z 2 0 1 0) ⋅ (d r d φ d z) . {\displaystyle {\begin{pmatrix}d\rho \\d\theta \\d\varphi \end{pmatrix}}={\begin{pmatrix}{\frac {r}{\sqrt {r^{2}+z^{2}}}}&0&{\frac {z}{\sqrt {r^{2}+z^{2}}}}\\{\frac {-z}{r^{2}+z^{2}}}&0&{\frac {r}{r^{2}+z^{2}}}\\0&1&0\end{pmatrix}}\cdot {\begin{pmatrix}dr\\d\varphi \\dz\end{pmatrix}}.}Еще из школьного курса алгебры и геометрии мы знаем о понятии трехмерного пространства. Если разобраться, сам термин «трехмерное пространство» определяется как система координат с тремя измерениями (это знают все). По сути, описать любой объемный объект можно при помощи длины, ширины и высоты в классическом понимании. Однако давайте, как говорится, копнем несколько глубже.
Что такое трехмерное пространство
Как уже стало ясно, понимание трехмерного пространства и объектов, способных существовать внутри него, определяется тремя основными понятиями. Правда, в случае с точкой это именно три значения, а в случае с прямыми, кривыми, ломаными линиями или объемными объектами соответствующих координат может быть больше.
В данном случае все зависит именно от типа объекта и применяемой системы координат. Сегодня наиболее распространенной (классической) считается Декартова система, которую иногда еще называют прямоугольной. Она и некоторые другие разновидности будут рассмотрены несколько позже.

Кроме всего прочего, здесь нужно разграничивать абстрактные понятия (если можно так сказать, бесформенные) вроде точек, прямых или плоскостей и фигуры, обладающие конечными размерами или даже объемом. Для каждого из таких определений существуют и свои уравнения, описывающие их возможное положение в трехмерном пространстве. Но сейчас не об этом.
Понятие точки в трехмерном пространстве
Для начала определимся, что представляет собой точка в трехмерном пространстве. В общем-то, ее можно назвать некой основной единицей, определяющей любую плоскую или объемную фигуру, прямую, отрезок, вектор, плоскость и т. д.

Сама же точка характеризуется тремя основными координатами. Для них в прямоугольной системе применяются специальные направляющие, называемые осями X, Y и Z, причем первые две оси служат для выражения горизонтального положения объекта, а третья относится к вертикальному заданию координат. Естественно, для удобства выражения положения объекта относительно нулевых координат в системе приняты положительные и отрицательные значения. Однако же сегодня можно найти и другие системы.
Разновидности систем координат
Как уже говорилось, прямоугольная система координат, созданная Декартом, сегодня является основной. Тем не менее в некоторых методиках задания местоположения объекта в трехмерном пространстве применяются и некоторые другие разновидности.

Наиболее известными считаются цилиндрическая и сферическая системы. Отличие от классической состоит в том, что при задании тех же трех величин, определяющих местоположение точки в трехмерном пространстве, одно из значений является угловым. Иными словами, в таких системах используется окружность, соответствующая углу в 360 градусов. Отсюда и специфичное задание координат, включающее такие элементы, как радиус, угол и образующая. Координаты в трехмерном пространстве (системе) такого типа подчиняются несколько другим закономерностям. Их задание в данном случае контролируется правилом правой руки: если совместить большой и указательный палец с осями X и Y, соответственно, остальные пальцы в изогнутом положении укажут на направление оси Z.
Понятие прямой в трехмерном пространстве
Теперь несколько слов о том, что представляет собой прямая в трехмерном пространстве. Исходя из основного понятия прямой, это некая бесконечная линия, проведенная через точку или две, не считая множества точек, расположенных в последовательности, не изменяющей прямое прохождение линии через них.

Если посмотреть на прямую, проведенную через две точки в трехмерном пространстве, придется учитывать по три координаты обеих точек. То же самое относится к отрезкам и векторам. Последние определяют базис трехмерного пространства и его размерность.
Определение векторов и базиса трехмерного пространства

Заметьте, это могут быть только три вектора, но вот троек векторов можно определить сколько угодно. Размерность пространства определяется количеством линейно-независимых векторов (в нашем случае - три). И пространство, в котором имеется конечное число таких векторов, называется конечномерным.
Зависимые и независимые векторы
Что касается определения зависимых и независимых векторов, линейно-независимыми принято считать векторы, являющиеся проекциями (например, векторы оси X, спроецированные на ось Y).

Как уже понятно, любой четвертый вектор является зависимым (теория линейных пространств). А вот три независимых вектора в трехмерном пространстве в обязательном порядке не должны лежать в одной плоскости. Кроме того, если определять независимые векторы в трехмерном пространстве, они не могут являться, так сказать, один продолжением другого. Как уже понятно, в рассматриваемом нами случае с тремя измерениями, согласно общей теории, можно построить исключительно только тройки линейно-независимых векторов в определенной системе координат (без разницы, какого типа).
Плоскость в трехмерном пространстве
Если рассматривать понятие плоскости, не вдаваясь в математические определения, для более простого понимания этого термина, такой объект можно рассматривать исключительно как двумерный. Иными словами, это бесконечная совокупность точек, у которых одна из координат является постоянной (константой).

К примеру, плоскостью можно назвать любое количество точек с разными координатами по осям X и Y, но одинаковыми координатами по оси Z. В любом случае одна из трехмерных координат остается неизменной. Однако это, так сказать, общий случай. В некоторых ситуациях трехмерное пространство может пересекаться плоскостью по всем осям.
Существует ли более трех измерений
Вопрос о том, сколько может существовать измерений, достаточно интересен. Как считается, мы живем не в трехмерном с классической точки зрения пространстве, а в четырехмерном. Кроме известных всем длины, ширины и высоты, такое пространство включает в себя еще и время существования объекта, причем время и пространство между собой взаимосвязаны достаточно сильно. Это доказал еще Эйнштейн в своей теории относительности, хотя это больше относится к физике, нежели к алгебре и геометрии.

Интересен и тот факт, что сегодня ученые уже доказали существование как минимум двенадцати измерений. Конечно, понять, что они собой представляют, сможет далеко не каждый, поскольку это относится скорее к некой абстрактной области, которая находится вне человеческого восприятия мира. Тем не менее факт остается фактом. И не зря же многие антропологи и историки утверждают, что наши пращуры могли иметь некие специфичные развитые органы чувств вроде третьего глаза, которые помогали воспринимать многомерную действительность, а не исключительно трехмерное пространство.
Кстати сказать, сегодня существует достаточно много мнений по поводу того, что экстрасенсорика тоже является одним из проявлений восприятия многомерного мира, и тому можно найти достаточно много подтверждений.
Заметьте, что современными базовыми уравнениями и теоремами описать многомерные пространства, отличающиеся от нашего четырехмерного мира, тоже не всегда представляется возможным. Да и наука в этой области относится скорее к области теорий и предположений, нежели к тому, что можно явно ощутить или, так сказать, потрогать или увидеть воочию. Тем не менее косвенные доказательства существования многомерных миров, в которых может существовать четыре и более измерений, сегодня ни у кого не вызывают сомнений.
Заключение
В целом же, мы очень кратко рассмотрели основные понятия, относящиеся к трехмерному пространству и базовым определениям. Естественно, существует множество частных случаев, связанных с разными системами координат. К тому же мы постарались особо не лезть в математические дебри для объяснения основных терминов только для того, чтобы вопрос, связанный с ними, был понятен любому школьнику (так сказать, объяснение «на пальцах»).
Тем не менее, думается, даже из таких простых трактовок можно сделать вывод о математическом аспекте всех составляющих, входящих в базовый школьный курс алгебры и геометрии.